Создание мобильных роботов, способных действовать на пересечённой местности, непростая задача. Главная проблема — распознавание препятствий. Привод же (колёса, гусеницы, руки-ноги) — вопрос вторичный. Один из способов ориентации, движение на ощупь, до сих пор недооценён.
За те десятилетия, что люди строят такие аппараты, чего только не придумали в качестве "распознавалки".
Главным образом конструкторы используют видеокамеры, инфракрасные и ультразвуковые датчики.
Здесь инженеры, как правило, замыкаются в плену человеческого образа действий: увидел, представил, что это за предмет, сообразил, как обойти.
Между тем, для выполнения определённого круга задач машине вовсе не обязательно прямо копировать человеческие функции.
Пару лет назад Швейцарский федеральный институт технологий в Лозанне (EPFL) создал весьма оригинального робота Octopus ("Осьминог").
Впрочем, робота логичнее было бы назвать "Осьмиколёсом", так как для распознавания препятствий он использует чувствительные колёса, коих у робота ровно восемь штук.
Внутри каждого колеса спрятаны 16 инфракрасных датчиков, которые измеряют деформацию шины, вызванную контактом с грунтом, камнями и прочими предметами.
Фактически, эта система действует, как тактильный сенсор.
Самое любопытное — датчики установлены так, что остаются неподвижными, пока шина вращается вокруг них.
|  | |
 | ||


Таким образом, робот может в любой момент определять положение препятствий в пространстве, как бы ощупывая их. Ведь "нижний" датчик контакта всегда нижним и остаётся.
Колёса закреплены на системе рычагов, также снабжённых двигателями. Они позволяют машине не только катиться, но и шагать.
Эту способность аппарат задействует при подъёме на препятствия.
Хотя машина внешне ничуть не похожа на осьминога, именем которого она названа, её способ движения напоминает действия этого морского животного.
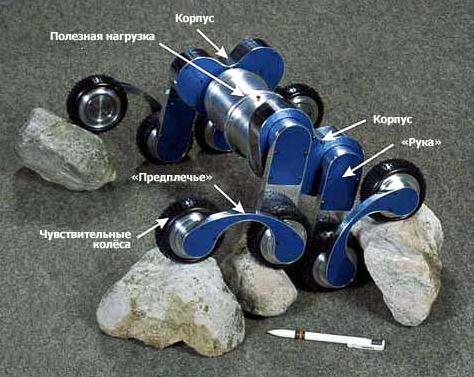 |
 Основные элементы Octopus (фото с сайта asl.epfl.ch). |
Аналогично Octopus, когда почувствует стенку передним колесом, поднимает его вверх, одновременно сдвигаясь вперёд, пока второе колесо не коснётся ступеньки.
Затем робот продолжает подъём, действуя двигателями "рук" и "предплечий" так, чтобы переднее колесо следовало за профилем ландшафта и достигло бы горизонтального участка.
Тогда машина начинает подтягиваться. Вес в этот момент робота распределён лишь между внешними колёсами.
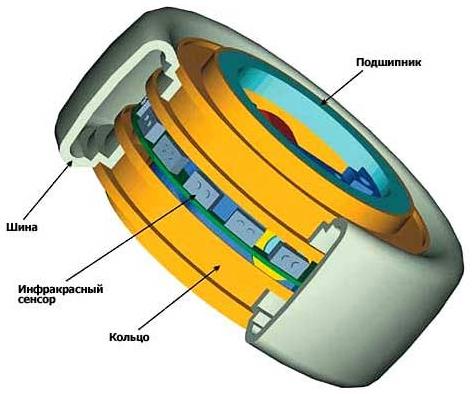 |
 Схема "тактильного" колеса (иллюстрация с сайта asl.epfl.ch). |
При этом, как подчёркивают швейцарцы, единственное уравнение, которое должно быть удовлетворено, чтобы достигнуть равновесия машины — уравнение вращающих моментов относительно различных её осей.
Эта сравнительно простая математическая задача позволяет "зашить" программу управления в относительно простой чип, который может справляться с задачей в реальном времени.
Мы далеки от мысли, что, развивая эту машину дальше, EPFL совершил бы революцию в создании роботов для пересечённой местности.
Однако в разнообразии вариаций автономных механизмов идея тактильных колёс, на наш взгляд, заслуживает не только упоминания, как курьёз, но и возрождения в какой-нибудь другой конструкции.
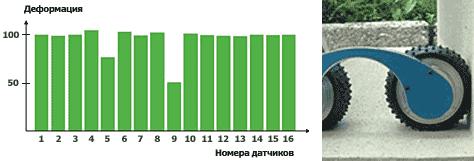 |
 Положение колеса и сигналы с датчиков. Большее значение соответствует меньшей деформации. Точка 5 — касание стены, точка 9 — опора на грунт (иллюстрации с сайта asl.epfl.ch). |
Но, почему-то, о тактильных сенсорах для роботов, сейчас говорят лишь применительно к "железным" рукам или стопам гуманоидных машин.
Статья о науки и техники получена: Membrana.ru








 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить



