Вот мы видим японца, он потихоньку шагает. Идёт, идёт, дозором обходит виртуальный мир, который видит через специальные очки. В реальном же мире он никуда не приходит – остаётся на том же месте. А возможность стоя идти ему дают четыре плитки, которые шустрят под ногами.
Зовут японца Хироюки Фукусима (Hiroyuki Fukushima), вместе с коллегами он трудится в университете Цукубы (University of Tsukuba), где и была изобретена сложная система под названием CirculaFloor.
Традиционные системы для путешествия в виртуальном мире в принципе точно так же позволяют перемещаться, не сходя с места: сидишь, жмёшь на кнопки, дёргаешь джойстик, но видишь, что бежишь, идёшь, ползёшь и так далее.
Однако при этом не разрешается физически почувствовать движение.
Единственное, что при взгляде на японскую разработку вспоминается — это "ВиртуСфера" братьев Латыповых: находящийся внутри шара пользователь ходит в виртуальном пространстве своими ногами. Что-то вроде белки в колесе. Но CirculaFloor устроена абсолютно по-другому.
Как называют его сами разработчики, это интерфейс для передвижения с использованием группы подвижных плиток, формирующих бесконечную поверхность.
|  | |
 | ||


Плитки способны везти 80-килограммовый полезный груз со скоростью 1,2 метра в секунду. Но в системе CirculaFloor двигаются гораздо медленнее, потому что работают в команде с целой кучей другого оборудования.
Так, за спиной пользователя установлена "крестовина" — это ультразвуковой датчик IS-600 Mark 2 от компании InterSense, он отслеживает положение и ориентацию человека в пространстве.
Тем же занимаются два датчика, встроенные в каждую плитку. Кроме того, действуют два, установленных на уровне пола, искателя в лазерном диапазоне LMS 200 немецкой компании SICK.
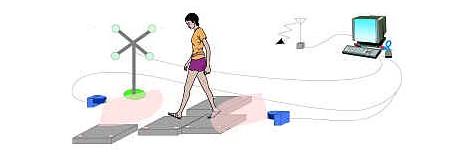 |
 "Крестовина" и лазерные искатели (синие) отслеживают положение пользователя, передавая данные на компьютер, который руководит плитками (фото с сайта tsukuba.ac.jp). |
При помощи ресиверов и трансмиттеров все данные, по проводам и без них, попадают в центральный компьютер, на котором установлена Windows XP и ПО, написанное на языках C и VC++.
Группа Фукусимы не скрывает, что CirculaFloor достаточно трудно смонтировать — эту проблему нужно как-то решать, чтобы демонстрировать опытный образец на выставках (впрочем, на SIGGRAPH 2004 систему вывезти удалось).
|  | |
 | ||


Так или иначе, описание всех нынешних целей проекта начинается со слова "развивать".
Если у вас есть возможность скачать 22-мегабайтное видео, обязательно посмотрите ролик.
 |
| |
 | ||


Ролик на самом деле впечатляет, из него ясно практически всё. А главное – видно, что система работает пока крайне медленно.
Максимальная скорость ходьбы по плиткам — 33 см/сек. И это, если идёшь строго в одном направлении. Захочешь свернуть — замедляйся до 21 см/сек. Между тем, люди ходят в среднем со скоростью 1,5 метра в секунду.
Хотя сами Vmax Carrier могут разогнаться прилично, получается, всю систему нужно ускорять раз в пять.
 |
 Vmax Carrier используется не только в CirculaFloor (фото с сайта robot.mes.titech.ac.jp). |
Японцы надеются, что сделать это удастся, и CirculaFloor произведёт революцию в сфере развлечений и обучении.
Одной из серьёзных областей применения, по мнению Фукусимы, будет "тренажёр эвакуации". В виртуальном мире можно отработать детальный план спасения людей и провести эксперименты, невозможные во время бедствия реального.
Статья о науки и техники получена: Membrana.ru









 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить



