Забудьте "Девочку на шаре". Смотрите: на шаре мобильный робот. Этот шар для него — и ноги, и колёса, и гусеницы. В общем, точка опоры, с помощью которой он переворачивает мир робототехники и, заодно, компьютерную мышь. Как так?
А вот так.
Чего мы хотим от роботов? Конечно, практичности и мобильности. Сейчас у них это есть. Однако всё то, что существует в этой области сейчас, по части удобства может быть охарактеризовано как громоздкое и неповоротливое.
Энтузиасты из университета Карнеги-Меллона (Carnegie Mellon University) Том Лауэрс (Tom B. Lauwers), Джордж Кантор (George A. Kantor) и Ральф Холлис (Ralph Hollis) давно занимаются всевозможными разработками, связанными с роботами, и считают такие проблемы крайне актуальными.
Вся их работа имеет под собой некую концептуальную основу. Они, в частности, утверждают, что статичные роботы – те, которые совершают операции, находясь на одном и том же месте, равно как и всяческие роботы на многочисленных колёсах – это тупиковая ветвь развития робототехники.
 |
| |
 | ||


Дополнительные точки опоры решают проблему лишь отчасти, порой добавляя ещё неповоротливости. И вообще, этих опор нужно сделать меньше, лучше всего одну, — считают американские специалисты.
Примерно этим путём команда робототехников, возглавляет которую профессор Холлис, пришла к идее нового исполнения опоры робота – в виде сферы. Так и появилась мысль о создании своего "Боллбота" (ballbot — от английского ball — шар; не путать с марсианскими Ballbots) – нового веского слова в изобретательстве.
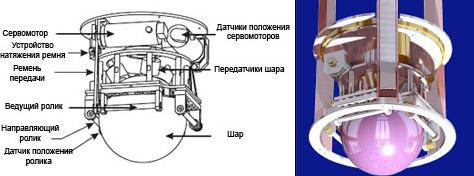 |
 Устройство главной части боллбота, которую его создатели называют "инвертированным шариком мыши" (фото с сайта msl.ri.cmu.edu). |
После многочисленных испытаний и промежуточных версий боллбот в сегодняшнем виде – полутораметровое устройство весом в 45 кило. Представляет оно собой фактически цилиндрическую этажерку с полками, на которых установлено всякое оборудование, и шаром с моторами внизу.
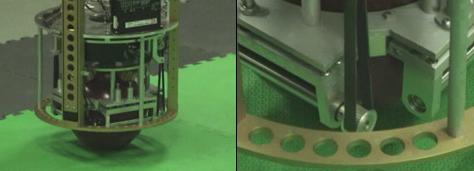 |
 Так выглядит "ходовая часть" боллбота (фото с сайта msl.ri.cmu.edu). |
Так как поколение людей, с шариковыми мышами не знакомых, уже подрастает, напомним, у этих недавно распространённых устройств принцип работы был примерно такой. Вращаясь, шарик передаёт вращательный момент на датчики-колёсики. Их расположение позволяет регистрировать движения шарика в двух измерениях. От датчиков сигнал идёт по проводу к компьютеру.
|  | |
 | ||


Но тут особенность ещё в том, что он не выскальзывает из-под всей этой конструкции. Более того, она сохраняет практически абсолютно вертикальное положение.
Для поддержания равновесия боллбот использует систему стабилизации, которая сразу же регистрирует отклонения от вертикальной оси с помощью специальных устройств на основе гироскопов.
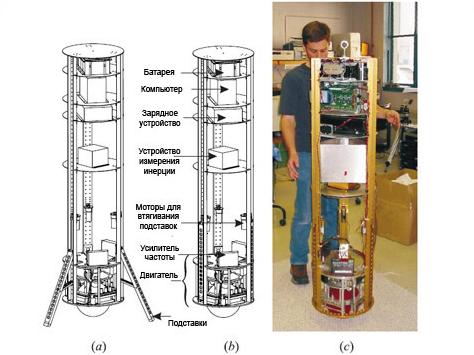 |
 Устройство боллбота (фото с сайта msl.ri.cmu.edu). |
Кстати, обратите внимание, он всё время сохраняет практически вертикальное положение: точность аппаратуры, основанной на двухсотмегагерцевом "Пентиуме", обеспечивает чувствительность к наклону в половину градуса!
 |
 Боллботу нашлось уже первое применение – в офисе. Неужели разносит кофе? (фото с сайта msl.ri.cmu.edu). |
Но насчёт грациозности разработчики, конечно, загнули. Откуда они это взяли – трудно сказать. Возможно, однажды кто-то из них засмотрелся на своё творение и случайно задумался о живописи. О творчестве, скажем, Пикассо.
Статья о науки и техники получена: Membrana.ru









 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




