"Сегодня вы хотите копать. Завтра вы захотите перевозить вещи. Днём позже вы пожелаете исследовать кратеры на южном полюсе Луны. Традиционный подход к построению отдельных роботов для отдельных задач, возможно, больше не адекватен для исследования космоса. Мы строим совсем другого робота – супербота!".
Это сказал адъюнкт-профессор Вэй Минь Шэнь (Wei-Min Shen) из университета Южной Калифорнии (USC), директор тамошней лаборатории полиморфной робототехники (Polymorphic Robotics Laboratory), в которой строят машину со скромным названием SuperBot.
Строят не в гордом одиночестве. В проекте участвуют университеты Пенсильвании (Modular Robotics at Penn), Гавайев (SuperBot Project), а также NASA, Lockheed Martin, Raytheon, пяток компаний поменьше и вездесущее агентство DARPA.
Такому кагалу необходимо соответствующее финансирование, и оно есть — бюджет "Супербота", вроде как, более $8 миллионов. И деньги эти, в основном, идут от NASA, потому как робот, прежде всего, нацелен на освоение космоса.
Да, вот ещё что: Вэй Минь Шэнь вам немного знаком, роботы-шайбы разрабатываются его командой.
 |
 Первый прототип модуля SuperBot и некоторые его возможности (фото Polymorphic Robotics Laboratory). |
Он может сформировать руку-манипулятор, стать ровером, машиной-альпинистом, чтоб спуститься в кратер, или мобильной платформой для жилья.
Робот достаточно универсален, чтобы функционировать даже в непредсказуемых окружающих средах.
 |
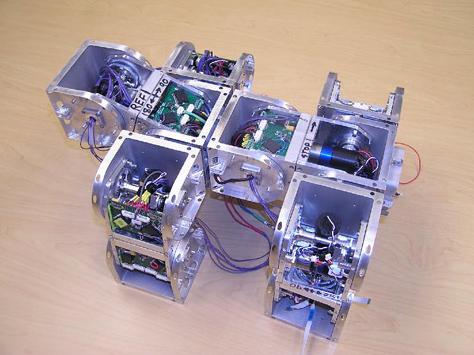
 Робот в "катящейся" конфигурации. Правда, тут он лежит на боку (фото Polymorphic Robotics Laboratory). |
Отдельно взятый модуль, имеющий 2 электромоторчика и компьютерный чип, может самостоятельно передвигаться как гусеница и переворачиваться. Соединиться друг с другом модули могут в четырёх местах с различной ориентацией.
Исследовательская фаза проекта завершена в ноябре прошлого года. Функциональные опытные образцы имеются.
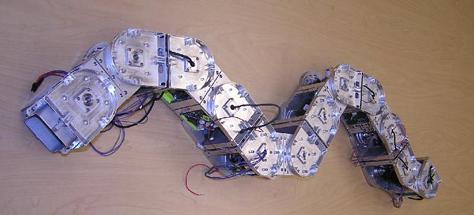 |
 Он рождён и ползать, и летать, и ездить, и ходить. Ползать уже умеет точно (фото Polymorphic Robotics Laboratory). |
Когда-то потом, до 2010 года, в пустыне пройдут тесты SuperBot из 100 модулей в четырёх отличных друг от друга конфигурациях: "съежившейся" для транспортировки и приземления, "катящейся" для движения на плоском ландшафте, "поднимающейся" для преодоления склонов и конфигурации "платформы".
 |
 И четвероногий вариант (фото Polymorphic Robotics Laboratory). |
Также разработчики намереваются однажды продемонстрировать "летательные способности" единственного модуля в условиях микрогравитации.
Вот после этого можно будет хотеть копать, вещи возить и в кратер на Луне заглянуть. И должно быть всё супер.
Статья о науки и техники получена: Membrana.ru









 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




