Небольшое животное вынырнуло из волн, наверное, подышать. Оно помахало небу плавником и через некоторое время величественно спустилось на большую глубину. На сотни километров вокруг не было ни души. Иначе человек удивился бы — оранжевая шкура животного была из алюминия и пластмассы.
В начале ноября 2004 года американский подводный робот-планер Spray завершил историческое подводное плавание поперёк Гольфстрима.
Ещё ни один робот не преодолевал такие океанские просторы. Примерно за 50 дней он в автоматическом режиме прошёл около тысячи километров от восточного побережья США (аппарат спустили в воду с борта исследовательского судна в районе мыса Код) до Бермудских островов.
Весь заплыв рядом с роботом не было никого. Лишь на берегу за "полётом" машины следили Брек Оуэнс (Breck Owens) и Брайан Гуэст (Brian Guest) из океанографического института WHOI (Woods Hole Oceanographic Institution), а также Расс Дэвис (Russ Davis) и Джефф Шерман (Jeff Sherman) из океанографического института Скриппса (Scripps Institution of Oceanography).
Именно эти два учреждения совместными усилиями и создали необычную машину. А трое упомянутых учёных стали не только авторами робота, но и составили для своего посланца научную программу и сами же проследили за её выполнением.
Длина робота составляет два метра, размах крыльев — 1,2 метра, вес — 81 килограмм.
Машина способна менять свою плавучесть. Но вместо балластной цистерны у неё есть податливый полимерный "плавательный пузырь", в который насосы закачивают масло (или откачивают), меняя тем самым общий объём корпуса.
Интересно, что управление по углу наклона корпуса осуществляется перемещением блока аккумуляторов внутри него в продольном направлении. Рулей высоты тут нет.
 |
 Старт и финиш. Между этими двумя снимками — более полутора месяцев и тысяча километров тернистого пути (фото с сайта whoi.edu). |
Угол спуска или подъёма составляет от 18 до 25 градусов.
Благодаря такому способу передвижения машина обладает "огромной" автономностью. Её теоретический запас хода (6 тысяч километров) позволяет пересечь Атлантику.
Правда, скорость движения невелика — 25-30 сантиметров в секунду. Так что трансокеанский переход занял бы у машины очень много времени.
Впрочем, 12 килограммов литиево-ионных батарей и сравнительно низкий расход энергии при планировании должны обеспечить машине такую возможность. Пока же она пересекла лишь малую часть океана.
 |
 Spray во всей красе (фото с сайта spray.ucsd.edu). |
На определённых участках ему пришлось бороться с сильным течением, но после долгих чередований "натисков" и вынужденных "отступлений" от намеченной цели, машина вышла к Бермудам, где её и выловили учёные.
Путь робота на карте был очень далёк от прямой. Машине приходилось учитывать направления небольших местных течений. Траектория же движения Spray в вертикальной плоскости напоминала огромную синусоиду.
Примерно 3,5-5 часов аппарат скользил вниз (до глубины 1 километр) и потом столько же времени поднимался вверх. За одно такое колебание он проходил пять километров по горизонтали.
При каждом подъёме на поверхность робот поворачивался на бок, на 90 градусов, и поднимал к небу правое или левое крыло.
Дело в том, что в кончик каждого из них встроен приёмник спутниковой системы навигации GPS, а также система спутниковой связи Iridium, по которой робот сбрасывал на берег свои координаты и научные данные, собранные на глубине.
Такое решение позволило исключить из конструкции лишние элементы крепления или выдвижные антенны, а ещё — повысило надёжность.
Так, на испытаниях один из экземпляров Spray переехал корабль, сломав как раз наконечник крыла. Но второй комплект антенн продолжил работу.
 |
 Схема робота-планера (иллюстрация с сайта spray.ucsd.edu). |
Кстати, по крену аппарат также управляется изменением положения тяжёлых аккумуляторов внутри корпуса, подобно тому, как это делается для изменения угла спуска или подъёма машины. Для этого служит отдельный блок батарей, вращающийся вокруг продольной оси.
Одновременно при таком сеансе связи учёные могли посылать роботу, также через спутник, поправки к программе, какие-либо новые инструкции.
В частности один раз ему "посоветовали" поправить курс, после того как робот, попав на участок сильного течения, потерял за два дня расстояние, с таким трудом пройденное за предыдущие две недели.
В этом рейсе Spray был оснащён датчиками давления, температуры, солёности и прозрачности воды.
Но учёные говорят, что в других миссиях машину можно будет оснастить иным набором оборудования, например, химическими анализаторами или биологическими датчиками. Или акустическим доплеровским измерителем течений, позволяющий строить вертикальные срезы подводных потоков.
В начале 2005 года Spray отправят в новое путешествие. Его маршрут будет близким к трассе нынешнего рейса.
Но на этот раз робот должен самостоятельно не только доплыть от побережья Массачусетса до Бермуд, но также в автономном режиме вернуться обратно.
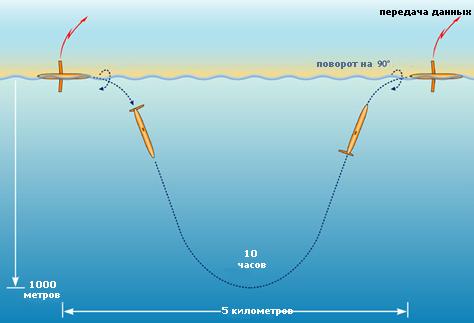 |
 Профиль полёта от одного сеанса связи до другого (иллюстрация с сайта spray.ucsd.edu). |
А поскольку энергия нужна этим машинам лишь на связь и работу насосов, время от времени управляющих плавучестью корпуса, запаса в аккумуляторе должно хватать на полгода автономной работы в океане.
Привлекательное свойство. Тем более, что максимальная глубина погружения машины составляет полтора километра, а для снятия с неё научных данных не требуется присутствия научного судна — океанологи могут получать через спутниковый "мост" поток ценных битов прямо с этих роботов на свои компьютеры в университете.
Статья о науки и техники получена: Membrana.ru









 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




