"Ступенька! Ну-ка, принеси мне книжку из спальни! Она или на кровати, или на тумбочке, или на пол свалилась!" — кричит бабушка. Этот приказ адресован роботу, который уже распознал бабулю по лицу и голосу, уточнил местонахождение её спальни и припомнил, какую книгу она читает. Так что книжку он принесёт.
Лет эдак через десять.
Что ещё за "Ступенька"? Вообще-то, STAIR в данном случае — не ступенька и не лестница. Это аббревиатура, образованная от "Стэндфордского робота с искусственным интеллектом" (Stanford Artificial Intelligence Robot). Впрочем, и ступенька тоже, в том смысле, что это шаг вперёд или вверх, к самым высоким технологиям.
Авторы проекта STAIR называют себя "большой амбициозной командой исследователей". Группа действительно немаленькая: 10 профессоров информатики плюс около 30 аспирантов и студентов.
"В течение десятилетия мы надеемся разработать технологии, которые сделают полезным присутствие робота в каждом доме и офисе, — рассказывает руководитель проекта Эндрю Нг (Andrew Ng). — Например, представьте, что вы устроили дома шумную вечеринку. Гости разошлись, и надо наводить порядок. Тут-то и появляется ваш робот. Он убирает весь мусор, вытряхивает пепельницы, собирает бокалы, тарелки и загружает их в посудомоечную машину".
 |
| |
 | ||


Кроме того, ожидается, что STAIR, умело используя несколько инструментов (например, отвёртку, молоток и плоскогубцы), сможет собрать предмет мебели от IKEA, скажем, книжную полку.
Наконец, последний "вызов" такой — робота хотят научить проводить своего рода экскурсии: он будет вести группу гостей по музею или лаборатории, отвечая на вопросы и открывая перед людьми двери.
"Цель состоит не в проектировании одного робота для решения одной отдельно взятой задачи. Мы хотим создать универсальную платформу для выполнения разнообразных функций", — пояснил Нг. В первую очередь, по его словам, робот позаботится об инвалидах и пожилых.
Авторы "Ступеньки" отдают себе отчёт в том, что перед ними поставлены крайне непростые цели. Разберём хотя бы случай с бабушкой и книжкой.
Сначала робот должен выяснить, о чём его просят. Возможно, для этого ему придётся сравнить услышанное с шаблонами вопросов из базы данных. Затем машине нужно произвести идентификацию человека по голосу и лицу. После этого STAIR, проанализировав план дома, выработает маршрут и отправится к месту назначения, ориентируясь с помощью лазеров и видеосенсоров, чтобы ни во что не врезаться и не сбить по пути хозяйского кота.
В конце концов, роботу надо будет найти искомый объект, о расположении которого имеются лишь предположения. Если STAIR найдёт-таки книгу, ему придётся проверить её, чтобы принести именно ту, что требуется. Для этого правильным будет просмотр текста, хотя бы — названия на обложке. Ещё робот должен уметь обращаться с предметами, которых он никогда прежде не видел, то есть, если это стеклянный бокал, его нужно осторожно взять и на обратном пути не разбить.
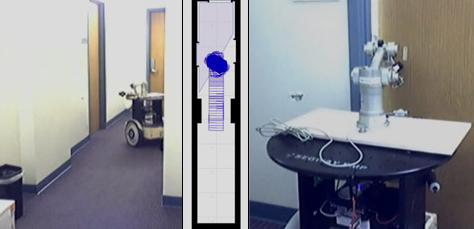 |
 Робот находит дверь и открывает её (изображения с сайта stanford.edu). |
Цели и задачи команды STAIR в целом ясны. Пора посмотреть, чего ей удалось добиться на сегодняшний день.
Рука у прототипа, построенного за первые несколько месяцев работы, всего одна, а ног нет вообще: вместо них использована двухколёсная платформа известного самоката (Segway Robotic Mobility Platform).
STAIR самостоятельно находит двери и открывает их (видео, WMV-файл; 5,62 мегабайта), а в ближайшем будущем освоится с кнопками лифта. Но всё это не так интересно, как новый алгоритм, который позволяет "Ступеньке" узнавать знакомые особенности в незнакомых объектах и выбирать правильный захват.
Этому робота обучали в генерируемой компьютером среде. Машине были предложены пять виртуальных предметов: чашка, карандаш, кирпич, книга и стеклянный бокал. Алгоритм определял наилучшее место для захвата того или иного объекта. У чашки это ручка, у карандаша — середина и так далее.
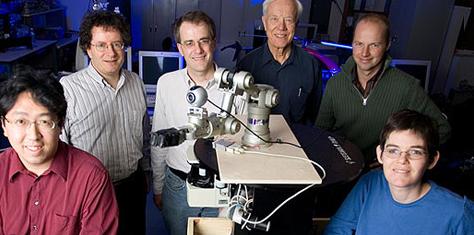 |
 Авторский коллектив проекта STAIR в расширенном составе (фото с сайта stanford.edu). |
"Рулон немного походит на ручку чашки и слегка смахивает на книгу, — говорит Нг. — Поэтому программа ищет лучшее место, чтобы робот мог ухватиться, основываясь на комбинации предшествующих событий. Таким образом вырабатывается гибрид, объединяющий все известные стратегии, которые робот узнал до этого".
Хотя достижения пока скромные, авторы STAIR полны оптимизма. "Мы изменим роль робототехники в нашем обществе", — обещают они. Сдержат ли разработчики слово, мы узнаем через пару лет. Во всяком случае, проблем с финансированием у группы, похоже, нет: неназванные деньги дают Национальный научный фонд США (US NSF), исследовательское агентство Пентагона DARPA, а также Intel, Honda, Ricoh и даже Google.
Статья о науки и техники получена: Membrana.ru









 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




