В будущих миссиях шаттлов и, вероятно, при дальнейшем развитии Международной Космической Станции, в свободном полёте вокруг этих обитаемых "железяк" будет дежурить самостоятельная камера-робот.
Проект называется "Миниатюрная автономная внешняя робот-камера" (Mini Autonomous Extravehicular Robotic Camera — Mini AERCam).
Аппарат разработан учёными и инженерами NASA, в частности, специалистами космического центра Джонсона (Johnson Space Center).
Камера представляет собой шарик, практически без выступающих частей. Его размер (чуть больше 19 сантиметров в диаметре) и вес (всего 5 килограммов) позволяет отнести эту машинку к наноспутникам, хотя оставлять на орбите в одиночестве её никто не будет.
Предполагается, что эта летающая камера сможет осматривать теплозащитное покрытие челнока или различные элементы МКС без необходимости выхода в открытый космос людей – долгого и опасного мероприятия.
Надо сказать, что предшественником Mini AERCam является опытный образец под названием AERCam Sprint. Похожий по общему устройству, он летал на шаттле (в рамках технологического эксперимента) в полёте STS-87 в 1997 году.
Только вот диаметр Sprint составлял 35,6 сантиметра, а вес — 15,88 килограмма.
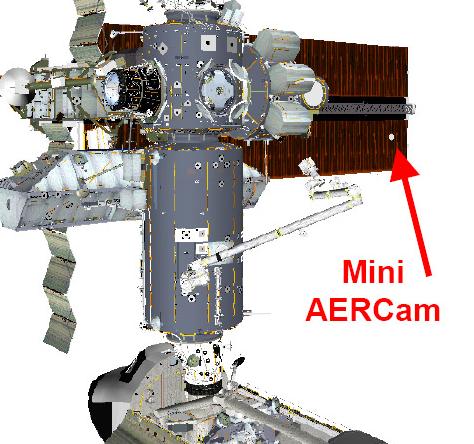 |
 Крошечный шарик, самостоятельно облетающий космическую станцию и шаттл, может стать важной мерой обеспечения безопасности (иллюстрация с сайта aercam.nasa.gov). |
Впрочем, главные отличия новой камеры от предшественницы – вовсе не в размерах. Роботизированная летающая камера поумнела.
Mini AERCam будет иметь на борту космического челнока (а в перспективе – и на борту МКС) – внешнюю докинг-станцию (видимо, в грузовом отсеке), с которой будет состыковываться в автоматическом режиме.
Через специальный разъём этот наноспутник будет пополнять свой запас электроэнергии и даже – топлива для ракетных двигателей (работающих на сжатом инертном газе – ксеноне). Там же он будет "отдыхать" в период, когда надобность во внешнем "глазе" отпадёт.
 |
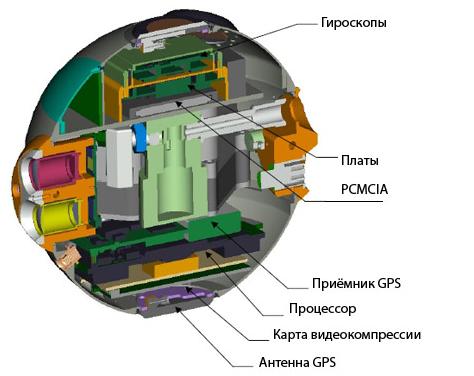
 Основные элементы Mini AERCam. Стыковочный узел находится с противоположной стороны от двойной камеры (иллюстрация с сайта aercam.nasa.gov). |
Рабочий инструмент Mini AERCam – две цветные видеокамеры формата NTSC, смотрящие под углом 90 градусов друг к другу и камера высокого разрешения (1 мегапиксель), совмещённая с одной из первых двух камер.
Робот имеет 12 миниатюрных ракетных двигателей для перемещения вокруг космического корабля и ориентации.
 |
 Электронная начинка робота-камеры. Слева и справа также можно увидеть сдвоенную камеру и стыковочный узел (иллюстрация с сайта aercam.nasa.gov). |
Несколько десятков светодиодов обеспечивают подсветку снимаемых объектов.
Добавим, что такая съёмка может понадобиться не только для осмотра возможных повреждений конструкций, но и при проведении экспериментов в космосе, при манипуляциях с объектами космической "рукой" (её собственные камеры могут показать не всё) и в других похожих случаях.
|  | |
 | ||


Непростое действие. А ведь "мозг" робота-камеры не слишком впечатляет. Это процессор PowerPC 740 (266 мегагерц) и 64 мегабайта оперативной памяти, расположенные на уникальной материнской плате.
Кстати, усложнение "глаза" по сравнению с прежней версией – это важный шаг на пути к ещё более грандиозному проекту NASA – летающему прямо внутри космической станции роботу-помощнику астронавтов, также, заметим, выглядящему как небольшой мячик.
Об этой идее мы уже подробно рассказывали.
В первом полёте "возвращения" (STS-114) Mini AERCam ещё не будет применяться, но в дальнейших миссиях шаттлов – вполне вероятно.
Статья о науки и техники получена: Membrana.ru








 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить


