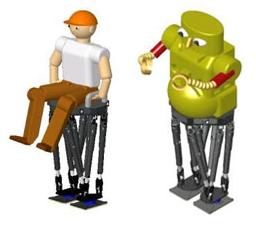
Ну, вот, скажите, как же этих японцев не любить и не уважать? Это же просто праздник какой-то. Такого напридумывают, что хоть стой, хоть падай. В случае же с новым произведением можно сидеть спокойно. Потому что это — двуногий стул, шагающее кресло!
Креслобот носит рабочее название WL-16. Аббревиатура расшифровывается просто: W — от участвовавшего в разработке университета (Waseda University), L — это нога (Leg), ну а номер 16 — просто-напросто порядковый, до него был WL-15. В имя шагающей машины не вместилось название ещё одного разработчика, одной робототехнической компании. Восстанавливаем справедливость — Tmsuk.
В вышеупомянутом университете механизмы и управление двуногих роботов группа профессора Ацуо Таканиши (Atsuo Takanishi) изучает аж с 1967 года, утвердившись во мнении, что наилучший способ передвижения гуманоидных машин, в конечном счёте, ходьба на двух ногах. Колёса и гусеницы — не то.
Серия Waseda-Leg стартовала с идеи создания двуногого модуля автоматизированной системы, которая даёт человеку возможность использовать верхнюю часть робота под свои нужды и потребности. Например, сесть на шагающую машину верхом. Впрочем, и в качестве платформы для "обычного" робота пару ног не использовать никто не зарекался.
|  | |
 | ||


В общем, для ног японцы решили использовать не последовательные, а параллельные кинематические механизмы 6DOF.
Они, по идее, должны придать машине высокую точность действия и механическую жёсткость, которые позволяют роботу носить тяжести и передвигаться с достаточно большой скоростью.
По поводу назначения двуногого стула инженеры даже фантазировать не стали. Ответ на вопрос "зачем": на фоне того, что Япония становится пожилой страной, робот рассматривается, как машина для поддержки во время прогулки или как альтернатива к инвалидным креслам, которые не могут справиться с лестницами.
 |
| |
 | ||


Собственно, на разработку WL-16 ушло два года. Ровно столько же японцам требуется, чтобы превратить опытный образец в серийную модель. 2005 год, значит. А пока что есть — то есть. Кстати, непонятно почему, но WL-16 называют "первым в мире роботом, шагающим на двух ногах". Не он первый, не он и последний.
Высота машины от 1,2 до 1,5 метров. По лестницам креслобот покамест не взбирается, зато ходит взад-вперёд и боком, правда, по ровным поверхностям с углублениями не больше нескольких миллиметров.
У ног двух наборов телескопических ног шесть степеней свободы и широкие пластины вместо подошв. Вес, который робот может нести, ограничен 60 кг. Маловато, да. Сам по себе идущий стул вместе с батареями Sanyo Electric весит столько же.
|  | |
 | ||

Со скоростью движения дела такие: WL-16 делает 1-2 шага в секунду, длина шага 30 см. Таким образом, наш креслобот шагает со скоростью 1-2 км/час. Катает, в общем, без ветерка. Для пожилых и инвалидов, может, и хватит такой стремительности, но для всех остальных — вряд ли. Почему-то кажется, что разогнать WL-16 раз в 10 не удастся. Но посмотрим.
 |
| |
 | ||


Итак, давайте поразмыслим, каким идущее кресло должно быть в идеале. Во-первых, чтоб крепко стояло хоть на двух ногах, хоть на одной — не падало ни при каких обстоятельствах. Во-вторых, хотелось бы больше скорости, маневренности, преодоления разных препятствий. И не шумел чтобы так.
В-третьих, нужно интуитивно понятное управление и нормальная продолжительность работы от одного набор аккумуляторов. В-четвёртых, хорошо бы, чтоб робот продавался по разумной цене. Наконец… Гм, а что наконец?
Статья о науки и техники получена: Membrana.ru








 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




