Любому уважающему себя роботу, пусть и с приставкой "нано", положены какие-то манипуляторы. Если же придётся работать с объектами масштаба молекулы, то и "руки" нужны очень тонкие. Новая технология позволяет использовать микронные механизмы, причём работающие за счёт сторонней энергии.
Не далее как 8 июля 2003 года калифорнийская корпорация Innovation On Demand, в лице своего шефа Кена Клементса (Ken Clements), получила патент на изобретение беспроводной техники микроактивации. За этим многозначительным словосочетанием скрывается простая и доступная технология управления нанороботами.
Дело в том, что микроскопические роботы, способные манипулировать объектами размером в несколько нанометров (10-9 метра), могли бы оказаться весьма полезны во многих отраслях народного хозяйства. Причём, вполне мирного свойства — у военных, тоже проявляющих живейший интерес к теме, задачи всё же помасштабнее, не какие-то там атомы с молекулами с места на место переставлять.
В то же время, по заверениям Клементса, в настоящий момент у роботов отсутствуют навыки обращениями с "предметами" меньше чем несколько микрон (10-6 метра). Правда, не очень понятно, уместно ли для таких микроскопических тварей название "робот". Ведь они не только интеллектом обделены и к обучению неспособны, но даже батарейку в их крохотное тельце не вставишь.
|  | |
 | ||

Но, с другой стороны, раз уж такие роботы могут ворочать нанометрами, то именно они и являются самыми что ни на есть нанороботами.
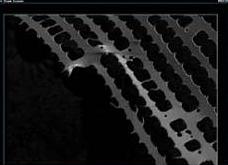
Конечно, за кипучей деятельностью этих механизмов невозможно наблюдать невооружённым глазом, требуется сканирующий электронный микроскоп. Так вот, идея изобретения состоит в том, чтобы использовать микроскоп не только для наблюдения, но и для обратной связи — отдачи роботу производственных указаний. При этом электронный луч будет буквально толкать робота под руку (ну, или хватать за ногу, как кому нравится).
Для реализации такого взаимодействия использованы свойства сплавов с эффектом памяти формы (Shape Memory Alloys – SMA), пластически деформированные изделия из которых способны при нагревании восстанавливать свои первоначальные очертания. Собственно, SMA-сплавам на титано-никелевой основе уже давно прочат переворот в нанотехнологиях, однако идея использования луча микроскопа для нагрева манипулятора запатентована только сейчас.
Кстати, с использованным в названии проекта термином TiNi (титано-никелевый) связана любопытная игра слов. Полностью созвучное ему "tiny" переводится с английского как "крошечный".
Как показывает практика, манипуляция объектами размером меньше микрона требует создания манипуляторов микронного размера, причём сила воздействия такого привода должна быть неуловимо мала. Существующие типы приводов (электромагнитный, пьезоэлектрический) не удовлетворяют этим параметрам.
SMA-устройства раньше не делались меньше, чем в несколько сот микрон. Следовательно, было необходимо ответить на два вопроса. Во-первых, каковы минимальные размеры, при которых сплавы сохраняют свои свойства? И, во-вторых, насколько малый объект можно выборочно нагреть, чтобы привести устройство в действие?
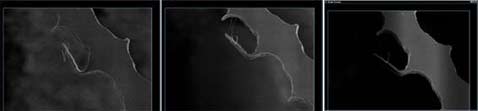 |
 Последовательные стадии распрямления манипулятора при нагреве лучом микроскопа (фото innovation-on-demand.com). |
Предыдущие исследования показали, что плёнка из SMA на титано-никелевой основе с добавлением кремния и оксида кремния толщиной в 100 нанометров (всего около 200 атомных слоёв) всё еще способна предсказуемо менять форму при нагревании.
Что же касается электронного сканирующего микроскопа, то его лучом можно нагревать области микронного диаметра. Для нагревания до необходимой температуры образца размером, например, 4 х 10 х 100 микрон необходимо 1,3*10-5 Дж, то есть возможной мощности луча 2*10-3 Вт хватит, чтобы сделать это за 6 миллисекунд.
Путём деформации достаточно толстой перфорированной плёнки из SMA и последующего нагрева лучом микроскопа удалось продемонстрировать прототип манипулятора с диаметром рабочего элемента 2 микрона и длиной в 20 микрон.
Теоретически же свойства сплава позволяют производить устройства минимум в 50 раз меньше, что вполне отвечает чаяниям экспериментаторов. Справедливости ради отметим, что манипуляторы таких размеров не были изготовлены и проверены, наверное, из-за скудости экспериментальной базы. С другой стороны, патент получен, пресс-релиз обнародован, чего же боле? Остаётся, как и полагается в таких ситуациях, ждать спонсоров.
Оптимистичные ожидания основываются на всевозможных применениях новой технологии. Необходимость использования проводных методов энергоснабжения не позволяет пока производить манипуляторы на SMA-основе размером меньше 100 микрон, каковые ограничения и снимаются беспроводным подходом к проблеме.
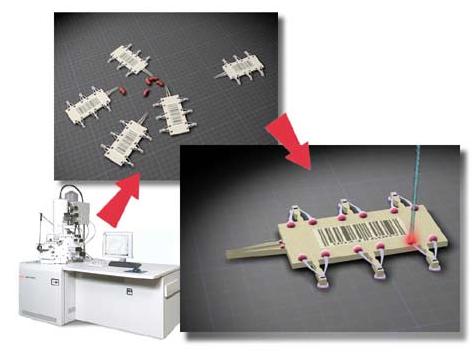
Клементс предлагает выпускать отдельные конструктивные микронные модули, из которых, как в детском конструкторе Lego, можно будет собрать робота любой конфигурации. Более того, возможны гибридные роботы с "большими", пьезоэлектрическими или электромагнитными роботоносителями, и SMA-манипуляторами для особо тонкой работы. Причём первые вполне могут заниматься производством вторых.
Планируется, что эти дерзновенные планы в первую очередь окажутся востребованными в медицине и микрохирургии — клапаны и стенты. Правда, при всём уважении к медикам, кажется, что это не их масштаб.
 |
 Пока что такие роботофабрики существуют только в голове художника. Похоже, стайка роботов напала на колонию вирусов (изображение innovation-on-demand.com). |
Далее, декларируется использование технологии в производстве биочипов для секретных нужд — чем чёрт не шутит, может этим биочипам как раз и не хватает TiNi-манипуляторов.
Ещё возможно таким образом делать разные микроскопические формы и шаблоны, и, наконец, этот инструментарий предлагается использовать в молекулярной биологии, для манипуляции белками и прочим генетическим материалом.
Всё очень заманчиво, но для управления новыми роботами хорошо бы использовать других роботов. Чтобы нам не портить глаза за электронным микроскопом, целясь согревающим лучом во всякие хлипкие роботовы ручки-ножки.
Статья о науки и техники получена: Membrana.ru








 Противовирусные препараты: за и против
Противовирусные препараты: за и против Добро пожаловать в Армению. Знакомство с Арменией
Добро пожаловать в Армению. Знакомство с Арменией Крыша из сэндвич панелей для индивидуального строительства
Крыша из сэндвич панелей для индивидуального строительства Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан
Возможно ли отменить договор купли-продажи квартиры, если он был уже подписан Как выбрать блеск для губ
Как выбрать блеск для губ Чего боятся мужчины
Чего боятся мужчины Как побороть страх перед неизвестностью
Как побороть страх перед неизвестностью Газон на участке своими руками
Газон на участке своими руками Как правильно стирать шторы
Как правильно стирать шторы Как просто бросить курить
Как просто бросить курить




